The Java Flight Recorder (JFR) is a powerful feature in the Oracle JDK. It allows you to record information about the Java runtime, and the application running in the Java runtime. When designing robots, it can be an invaluable tool. Robo4J has some integration with the Java Flight Recorder out of the box.
In this blog, I will use the JFR integration to simplify the calibration necessary to make use of the LaserScanner class.
Calibrating Servos
Step one is to calibrate whatever servos are involved in doing a scan. I have a pan servo and a tilt servo. Only the pan servo is actually involved in the LaserScanner class - it provides 2D scans. That said, I need for the tilt servo to be calibrated properly too, if nothing else to ensure that I get level scans. To calibrate the servos, see my Servo Calibration blog.
First Configuration
The second step is to configure reasonable defaults for the configuration file for the LaserScannerExample ($ROBO4J_HOME/robo4j-units-rpi/src/examples/resources/lidarexample.xml). The most important part is to copy the values from your calibrated pan servo in the first step to the laserscanner.servo entry. Also, ensure that you set the minimum acquisition time depending on the version of the Lidar Lite you have. The v1 requires at least 20 ms. The v2 and later should be okay with 2ms. For the rest of the settings, leave the defaults for now.
Doing Flight Recordings
The next step is to run the a few scans using the LaserScannerExample and look at the results.
First source the envionment variables:
First source the envionment variables:
source scripts/rpi/environment.sh
Next run the LaserScannerExample with the flight recorder enabled. We will connect over JMX, so you need to open the appropriate ports, for example:
sudo java -XX:+UnlockCommercialFeatures -XX:+FlightRecorder -Dcom.sun.management.jmxremote.port=7091 -Dcom.sun.management.jmxremote.rmi.port=7091 -Dcom.sun.management.jmxremote.authenticate=false -Dcom.sun.management.jmxremote.ssl=false -Djava.rmi.server.hostname=coffewlan -cp $ROBO4J_PATH com.robo4j.units.rpi.lidarlite.LaserScannerExample
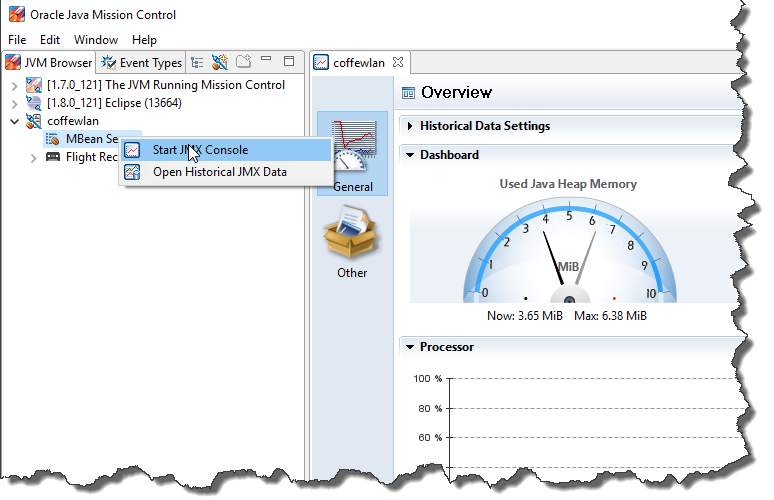
Next, get the robo4j-tools repo for Robo4J, and follow the instructions to start Java Mission Control (JMC) with the Robo4J plug-in.
Create a connection to your RaspberryPi running the example. You can connect with the JMX console to see that the connection works.
Next create a recording from Java Mission Control by right clicking on your connection and select “Start Flight Recording". You can use any recording template, just make sure to enable the Robo4J specific events in the last page of the wizard.


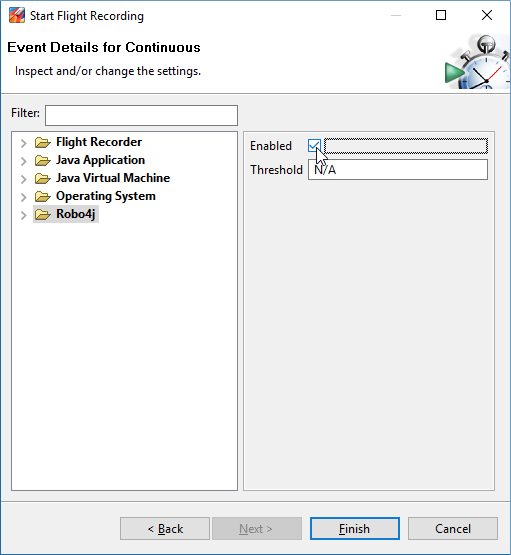
Click finish to start the recording. Once done, it will be downloaded to JMC automatically. Now, since you are using the Robo4J plug-in, the scans will be visualized for you. Open the Robo4J tab group, and select a scan to take a look at it.
If you suspect your servo is travelling too fast or slow (multiple sample points in the end with the same reading(s), weird artifacts in the end of a scan), adjust the angularSpeed. If you feel the laser do not get enough time to acquire, increase the minAcquisition time. Also, since we move the servo whilst acquiring, you may need to compensate the angular speed. Since I was lazy and didn’t have time to spend looking for a perfect physical model, there is a trim parameter to compensate (to make the left-to-right, and right-to-left scans align).
Below is a picture of a couple of individual scans on my robot without trim (simply shift- or control-click a few scans to render them simultaneously):

And the picture below is with trim set to 5.5:

Simply keep doing recordings and bisect your way to a proper trim value for your particular setup.
Thamnks for sharing such a great article on Robotics
ReplyDeleteRPA Training In Bangalore
Robotics Course In Bangalore
nice post
ReplyDeleteThis comment has been removed by the author.
ReplyDeleteThis comment has been removed by the author.
ReplyDeleteCalibration is an vital step of 3-d established light laser scanners which will achieve an correct measuring end result. all through the calibration a relation between the pixels in 3-D laser scanner digital camera photograph and the actual international devices is made. Laser line detection technique as a part of the calibration procedure performs an vital function in this calibration system, but this element has not been investigated before. in this paper the calibration and dimension end result dependency from the laser line detection with pixel or sub-pixel decision inside the calibration manner has been investigated. The calibration manner of the developed three-D laser scanner has been defined. The effects display dependency among the laser line detection approach within the calibration manner and the final dimension consequences. heatsign
ReplyDeleteI feel really happy to have seen your webpage and look forward to so many more entertaining times reading here. Thanks once more for all the details.
ReplyDeletedata-science-training-in-bangalore
This comment has been removed by the author.
ReplyDeleteThose guidelines additionally worked to become a good way to recognize that other people online have the identical fervor like mine to grasp great deal more around this condition.
ReplyDeletehadoop training in bangalore
Thanks for sharing the nice information on robotics and Java
ReplyDeleteIoT Online Training | IoT Training
Nice post,thanks for sharing the valuable information. Best software Training institute in Bangalore
ReplyDeleteIts Very Nice Article I'm Very Happy To Read This One Thank you For Sharing.
ReplyDeleteBest Software Training Institute in Chennai
Best Online Training Institute in Chennai
Curiosity has been increased to learn updates on recent technology after reading your article.
ReplyDeleteSelenium training in Chennai
Selenium Courses in Chennai
best ios training in chennai
Digital Marketing Training in Chennai
JAVA J2EE Training Institutes in Chennai
web development courses in chennai
web designing training institutes in chennai
web design training chennai
One of the best blogs that I have read till now. Thanks for your contribution in sharing such a useful information. Waiting for your further updates.
ReplyDeleteEnglish Coaching Classes in Bangalore
Spoken English Course in Bangalore
English Spoken Classes in Bangalore
English Classes in Bangalore
Spoken English Institutes in Bangalore
Spoken English Coaching Classes near me
English Learning Classes in Bangalore
Pretty blog, so many ideas in a single site, thanks for the informative article, keep updating more article.
ReplyDeleteJava Training in Chennai
Java course in Chennai
Hadoop Training in Chennai
Python Training in Chennai
Java Training in Porur
Java Training in Adyar
Java Training in Tnagar
This comment has been removed by the author.
ReplyDeleteGreat Article, to see about IOT on Today's net
ReplyDeleteData Science Course
You might comment on the order system of the blog. You should chat it's splendid. Your blog audit would swell up your visitors. I was very pleased to find this site.I wanted to thank you for this great read!!
ReplyDeletehttps://www.excelr.com/digital-marketing-training-in-pune - digital marketing courses in pune
I was just browsing through the internet looking for some information about Java Flight Recorder and came across your blog. I am impressed by the information that you have on this blog. Thank you
ReplyDeleteData Science
Easily, the article is actually the best topic on this registry related issue. I fit in with your conclusions and will eagerly look forward to your next updates.
ReplyDeleteDATA SCIENCE COURSE
I definitely enjoying every little bit of it and I have you bookmarked to check out new stuff you post.
ReplyDeletedate analytics certification training courses
data science courses training
data analytics certification courses in Bangalore
A great website with interesting and unique material what else would you need.
ReplyDeleteIt should be noted that whilst ordering papers for sale at paper writing service, you can get unkind attitude. In case you feel that the bureau is trying to cheat you, don't buy term paper from it.
ReplyDeletewhat are solar panel and how to select best one
learn about iphone X
top 7 best washing machine
iphone XR vs XS max
great and helpful article
ReplyDeleteIMT Business School
ReplyDeleteThis is also a very good post which I really enjoyed reading. It is not every day that I have the possibility to see something like this,
Love it, technewworld.in.
Usually I never comment on blogs but your article is so convincing that I never stop myself to say something about it. You’re doing a great job Man,Keep it up.
ReplyDeleteHow to write best comment that approve fast
This blog is more informative and innovative from others.
ReplyDeleteweb designing course in chennai with placement
php mysql course in chennai
magento training in chennai
Car Maintenance Tips That You Must Follow
ReplyDeleteFor everyone who owns it, Car Maintenance Tips need to know.
Where the vehicle is currently needed by everyone in the world to
facilitate work or to be stylish.
You certainly want the vehicle you have always been in maximum
performance. It would be very annoying if your vehicle isn’t even
comfortable when driving.
Therefore to avoid this you need to know Vehicle Maintenance Tips or Car Tips
Buy New Car visit this site to know more.
wanna Buy New Car visit this site.
you dont know about Car Maintenance see in this site.
wanna know about Car Tips click here.
know more about Hot car news in here.
Really informative blog for all people. Thanks for sharing it.
ReplyDeletepearson vue test center in chennai
german language course
IELTS Training in Chennai
Japanese Language Course in Chennai
Spoken English in Chennai
TOEFL Training in Chennai
Informatica Training Institute in Chennai
Thanks for the insightful post SEO Training in Chennai
ReplyDeleteLogoSkill, Logo Design Company is specifically a place where plain ideas converted into astonishing and amazing designs. You buy a logo design, we feel proud in envisioning
ReplyDeleteour client’s vision to represent their business in the logo design, and this makes us unique among all. Based in USA we are the best logo design, website design and stationary
design company along with the flayer for digital marketing expertise in social media, PPC, design consultancy for SMEs, Start-ups, and for individuals like youtubers, bloggers
and influencers. We are the logo design company, developers, marketers and business consultants having enrich years of experience in their fields. With our award winning
customer support we assure that, you are in the hands of expert designers and developers who carry the soul of an artist who deliver only the best.
Logo Design Company
LogoSkill,
ReplyDeleteLogo Design Company
is specifically a place where plain ideas converted into astonishing and amazing designs. You buy a logo design, we feel proud in envisioning
our client’s vision to represent their business in the logo design, and this makes us unique among all. Based in USA we are the best logo design, website design and stationary
design company along with the flayer for digital marketing expertise in social media, PPC, design consultancy for SMEs, Start-ups, and for individuals like youtubers, bloggers
and influencers. We are the logo design company, developers, marketers and business consultants having enrich years of experience in their fields. With our award winning
customer support we assure that, you are in the hands of expert designers and developers who carry the soul of an artist who deliver only the best.
Logo Design Company
Thank you for developing this fabulous information and this is very useful for me. I liked your post and keep doing...!
ReplyDeleteSpark Training in Chennai
Spark Training
Pega Training in Chennai
Primavera Training in Chennai
Unix Training in Chennai
Linux Training in Chennai
Social Media Marketing Courses in Chennai
Job Openings in Chennai
Placement Training in Chennai
Spark Training in Adyar
Great blog, I was searching this for a while. Do post more like this.
ReplyDeleteAngularJS Training in Chennai
Angular 4 Training in Chennai
Angular 5 Training in Chennai
Angular Training in Chennai
ReactJS Training in Chennai
PHP course in Chennai
Web Designing Training in Chennai
AngularJS Training in Anna Nagar
AngularJS Training in Vadapalani
AngularJS Training in Thiruvanmiyur
"This is the best website for Unique clipping path and high quality image editing service Company in Qatar. Unique clipping path
ReplyDelete"
baby cribs combo
ReplyDeleteThese baby cribs reviews help you to find out a traditional, unique, safe,
comfortable, reliable, sustainable and also most perfect baby cribs.
ReplyDeleteBob Proctor is an icon that has worked for many years helping people to learn their self-worth. He has written various different books in helping people to become prosperous
within their personal lives. In these books he covers different aspects which aid in a variety of different real-life situations that people experience.
Because of his work and way with words people have grown to respect him for his
stay motivated . His wise quotes are also known for giving people a sense of security,
self-worth and meaning in life. What a true gift to be able to help people from all over the world prosper in their lives.
visit website
ReplyDeleteThank you so much for sharing the article. Really I get many valuable information from the article
With our Digital Marketing Training, re-discover your creative instinct to design significant marketing strategies to promote a product/service related to any organization from any business sector.
Digital Marketing Course in Sydney
Hi Guys. We are a family-owned business started in 1971 in Sparks, Nevada. We have an automotive parts warehouse distribution system for automobiles and light and heavy-duty trucks with several shipping locations throughout the United States. We specialize in drivetrain-related areas and provide experience and expertise to assist you in getting the correct parts the first time. We offer free diagnostics and road testing as well as free troubleshooting support by telephone. We would be honored if We can help you. drivetrain
ReplyDeleteTransmission slip yokes area unit factory-made with many U-joint series, therefore it's necessary to decide on the U-joint that matches your power unit and torsion necessities. Spline count, seal diameter and length can establish the slip yoke that's needed for your transmission. Transmission slip yokes .
ReplyDeleteThank you for excellent article.You made an article that is interesting.
ReplyDeleteAWS Solutions Architect courses in Bangalore with certifications.
https://onlineidealab.com/aws-training-in-bangalore/
This comment has been removed by the author.
ReplyDeleteReally nice and interesting post. I was looking for this kind of information and enjoyed reading this one. Keep posting. Thanks for sharing.
ReplyDeletedata science course
data science interview questions
Nice information, valuable and excellent design, as share good stuff with good ideas and concepts, lots of great information and inspiration, both of which I need, thanks to offer such a helpful information here.
ReplyDeletedigital marketing course in chennai
SKARTEC Digital Marketing
best digital marketing training in chennai
seo training in chennai
online digital marketing training
best marketing books
best marketing books for beginners
best marketing books for entrepreneurs
best marketing books in india
digital marketing course fees
best seo service in chennai
SKARTEC SEO Services
digital marketing resources
digital marketing blog
digital marketing expert
how to start affiliate marketing
what is affilite marketing and how does it work
affiliate marketing for beginners
Genyatra provides train ticket, flight ticket, senior citizen yatra services to its Clients across World.
ReplyDeleteTicketing: All types of Domestic and International Flight ticket booking at competitive price. We provide best corporate fare and group fare across world.
Packages: We create specialized travel packages like family holidays, honeymoons, meetings, pilgrimage tours, special packages for senior citizen tours & women tours.
Visa and Forex: We Specialize in visa assistance for Individual and Group. We provides foreign currency at best exchange available rates. we provide Travel insurance.
Flight tkt, teerthyatra, foreign exchange rail ticket
At the point when you're attempting to get in shape, you need to ensure that your eating regimen is working for you. That is the reason you ought to be taking an enhancement called keto formation pills diet pills.
ReplyDeletehttps://deliver4superior.com/
Shop Mountain bikes for sale from Scott Mountain Bikes, Giant Mountain Bikes, Felt Mountain Bikes, Cannondale Mountain Bikes and many more with competitive price.
ReplyDeleteThanks for sharing an informative blog keep rocking bring more details...Hopefuls who are qualified Intermediate or 10+2 Can apply for the HP Post office Recruitment 2020...
ReplyDeleteBig Truck Tow: Heavy Duty towing service san jose
ReplyDeleteWe're rated the most reliable heavy duty towing san jose service & roadside assistance in San Jose!
Call us now! We're ready to help you NOW!
Since 1999, tow truck san jose has provided quality services to clients by providing them
with the professional care they deserve. We are a professional and affordable Commercial
Towing Company. BIG TRUCK TOW provides a variety of services, look below for the list of
services we offer. Get in touch today to learn more about our heavy duty towing
Click here to Find tow truck near me
Thanks for sharing such a nice information with us...
ReplyDeleteSpoken English Classes in Bangalore
Thanks for sharing this information. I really Like Very Much.
ReplyDeleteworkday hcm online training
I think I have never seen such blogs ever before that has complete things with all details which I want. So kindly update this ever for us.
ReplyDeletedata science course in malaysia
data science certification
data science course malaysia
data science malaysia
data scientist course malaysia
Talk with Strangerstalk to strangers in Online Free Chat rooms where during a safe environment.
ReplyDeleteFrom friendships to relationships.omegle teen Talk With Stranger is that the best online chatting site.
Its the simplest alternative to airg chat, Badoo , omegle & mocospace. If you're keen on speaking
with people on the web ,chat random or want to seek out omegle girls, do free texting or sexting, make new friends.
you'll find your omegle lady here. Please note this is often not a sexting site so you can't do sexting
online. this is often a familychatous friendly chat site. we've voice chat if you would like to try to to phone
chat online. Our most viral is that the 1-1 one on one random chat.talkwithstranger No check in on login needed.
we've teengers also asanonymous chat older people that want to satisfy new people. Online random chat is that the best
chatrandom alternative.
Other content online cannot measure up to the work you have put out here. Your insight on this subject has convinced me of many of the points you have expressed. This is great unique writing.
ReplyDeleteSEO Services in Kolkata
Best SEO Services in Kolkata
SEO Company in Kolkata
Best SEO Company in Kolkata
Top SEO Company in Kolkata
Top SEO Services in Kolkata
SEO Services in India
SEO Company in India
nice..
ReplyDeleteSEO training in hyderabad by experts in digital markeing And by prosessional experts in seo.All the training by placement and also guide by the professionals keep it up.
Ai & Artificial Intelligence Course in Chennai
PHP Training in Chennai
Ethical Hacking Course in Chennai Blue Prism Training in Chennai
UiPath Training in Chennai
I will really appreciate the writer's choice for choosing this excellent article appropriate to my matter.Here is deep description about the article matter which helped me more.
ReplyDeleteKnow more about Data Analytics
I am genuinely thankful to the holder of this web page who has shared this wonderful paragraph at at this place
Cool stuff you have, and you keep overhaul every one of us.
I am astounded with regards to how extraordinary this article is. The substance is easy to comprehend and exceptionally captivating. This is by a long shot the absolute best substance I've seen.
ReplyDeleteDenial management software
Denials management software
Hospital denial management software
Self Pay Medicaid Insurance Discovery
Uninsured Medicaid Insurance Discovery
Medical billing Denial Management Software
Self Pay to Medicaid
Charity Care Software
Patient Payment Estimator
Underpayment Analyzer
Claim Status
IoT devices can be Checked here .Just Right Your Product name
ReplyDeleteBuy Connectors at enrgtech
this roboties related information very nice to read...keep it up guys..
ReplyDeleteAngularJS training in chennai | AngularJS training in anna nagar | AngularJS training in omr | AngularJS training in porur | AngularJS training in tambaram | AngularJS training in velachery
Given below are some prominent benefits you can enjoy if you opt for data science training. 360DigiTMG data science course in hyderabad
ReplyDeleteWhat is then left is the question of creativity - the ability to act, not just react, the ability to initiate, not just follow orders, the ability to self improve and, taking us back to where we started, the ability to lie where circumstances dictate that the truth is not enough. artificial intelligence training in hyderabad
ReplyDeleteimpressive thank you for share information
ReplyDeleteData science Training in bangalore
Hadoop Training In Bangalore
Thanks for sharing the useful information on robotics and Java.
ReplyDeleteAngular JS Training in Chennai | Certification | Online Training Course | Angular JS Training in Bangalore | Certification | Online Training Course | Angular JS Training in Hyderabad | Certification | Online Training Course | Angular JS Training in Coimbatore | Certification | Online Training Course | Angular JS Training | Certification | Angular JS Online Training Course
Great Blog.. Very informative content
ReplyDeleteIELTS training in chennai
German Classes in Chennai
GRE Coaching Classes in Chennai
TOEFL Coaching in Chennai
spoken english classes in chennai | Communication training
ReplyDeleteThanks for provide great informatic and looking beautiful blog
Data science Training in bangalore
Aws Training In Bangalore
Hadoop Training In Bangalore
Devops Training In Bangalore
Iot Training in Bangalore
This is an excellent post I seen thanks to share it. It is really what I wanted to see hope in future you will continue for sharing such a excellent pos
ReplyDeleteData Science Training In Chennai | Certification | Data Science Courses in Chennai | Data Science Training In Bangalore | Certification | Data Science Courses in Bangalore | Data Science Training In Hyderabad | Certification | Data Science Courses in hyderabad | Data Science Training In Coimbatore | Certification | Data Science Courses in Coimbatore | Data Science Training | Certification | Data Science Online Training Course
It is really explainable very well and i got more information from your site.Very much useful for me to understand many concepts and helped me a lot. Congratulations! This is the great things. Thanks to giving the time to share such a nice information.
ReplyDeleteSalesforce Training in Chennai | Certification | Online Course | Salesforce Training in Bangalore | Certification | Online Course | Salesforce Training in Hyderabad | Certification | Online Course | Salesforce Training in Pune | Certification | Online Course | Salesforce Online Training | Salesforce Training
ReplyDeletetrung tâm tư vấn du học canada vnsava
công ty tư vấn du học canada vnsava
trung tâm tư vấn du học canada vnsava uy tín
công ty tư vấn du học canada vnsava uy tín
trung tâm tư vấn du học canada vnsava tại tphcm
công ty tư vấn du học canada vnsava tại tphcm
điều kiện du học canada vnsava
chi phí du học canada vnsava
#vnsava
@vnsava
Really nice and interesting post. I was looking for this kind of information and enjoyed reading this one. Keep posting. Thanks for sharing.
ReplyDeletepmp certification course training in guduvanchery
Easily, the article is actually the best topic on this registry related issue. I fit in with your conclusions and will eagerly look forward to your next updates.
ReplyDeleteweb designing training in chennai
web designing training in omr
digital marketing training in chennai
digital marketing training in omr
rpa training in chennai
rpa training in omr
tally training in chennai
tally training in omr
Great information. The content you wrote is very interesting to read. This will loved by all age groups.
ReplyDeletejava training in chennai
java training in tambaram
aws training in chennai
aws training in tambaram
python training in chennai
python training in tambaram
selenium training in chennai
selenium training in tambaram
Its Very Nice Article I'm Very Happy To Read This One Thank you For Sharing.
ReplyDeleteacte reviews
acte velachery reviews
acte tambaram reviews
acte anna nagar reviews
acte porur reviews
acte omr reviews
acte chennai reviews
acte student reviews
Awesome blog...thanks for sharing valuable articles.....
ReplyDeleteSpring Training in Chennai
Spring framework Training in Chennai
Spring course in Chennai
Wordpress Training in Chennai
Struts Training in Chennai
Struts course in Chennai
very helpfull information.First Copy Watches For Men
ReplyDeleteOne of the best blogs that I have read till now. Thanks for your contribution in sharing such a useful information
ReplyDeletesap training in chennai
sap training in annanagar
azure training in chennai
azure training in annanagar
cyber security course in chennai
cyber security course in annanagar
ethical hacking course in chennai
ethical hacking course in annanagar
Deletehttps://www.crusherandparts.com
Cone Crusher Liners
Vibrating Screen Mesh Types
Impact Plate
Impact Crusher Blow Bars
Jaw crusher wear parts
Great post i must say and thanks for the information. Education is definitely a sticky subject. However, is still among the leading topics of our time. I appreciate your post and look forward to more.
ReplyDeleteSimple Linear Regression
Correlation vs covariance
KNN Algorithm
https://www.shaneshirley.com/2017/06/do-consumers-care-if-brands-are-on.html?showComment=1597838132915#c2086358441377074879
ReplyDeleteawesome article,the content has very informative ideas, waiting for the next update...
ReplyDeleteoet coaching centre in chennai
oet coaching in chennai
oet training in chennai
best oet coaching centre in chennai
google analytics training in chennai
valuable blog thanks for sharing it...waiting for the next update...
ReplyDeletemysql training in chennai
mysql course
mysql training
advanced excel course in chennai
sharepoint course in chennai
advanced excel training
Search on Google for a course that allows you to learn both theoretical and practical knowledge. digital marketing course in hyderabad
ReplyDeleteReally a cool blog and I personally like it, good work done here.
ReplyDeleteFull Stack Course Chennai
Full Stack Training in Bangalore
Full Stack Course in Bangalore
Full Stack Training in Hyderabad
Full Stack Course in Hyderabad
Full Stack Training
Full Stack Course
Full Stack Online Training
Full Stack Online Course
According to the latest research by Burning Glass, Salesforce stood at 7th place among in-demand software skill ahead of IT skills including.
ReplyDeleteSalesforce Training in Chennai
Salesforce Online Training in Chennai
Salesforce Training in Bangalore
Salesforce Training in Hyderabad
Salesforce training in ameerpet
Salesforce Training in Pune
Salesforce Online Training
Salesforce Training
Blog is filled with very useful information and excellent writing thank you.
ReplyDeleteData Science Course in Hyderabad 360DigiTMG
Thank you for your message. I've been thinking about writing a very similar article for the last few weeks, I'll probably keep it short and to the point and link to this article instead if that's interesting. Thank you.
ReplyDeleteArtificial Intelligence Course in Bangalore
valuable blog,Informative content...thanks for sharing, Waiting for the next update...
ReplyDeleteMEAN Stack Training in Chennai
MEAN Stack Course in Chennai
MEAN Stack Course
MEAN Stack Training
C C++ Training in Chennai
core java training institutes in chennai
"I feel very grateful that I read this. It is very helpful and very informative and I really learned a lot from it. data science courses
ReplyDelete"
I truly like only reading every one your web logs. Simply desired to in form you which you simply have persons such as me that love your own work out. Absolutely an extraordinary informative article. Hats off to you! The details which you have furnished is quite valuable. Learn best 360DigiTMG Tableau Course in Bangalore
ReplyDeleteAwesome blog with excellent information and fantastic writing skills found very useful thanks for Sharing you.
ReplyDeletetypeerror nonetype object is not subscriptable
wonderful article. I would like to thank you for the efforts you had made for writing this awesome article. This article resolved my all queries. data science courses
ReplyDeleteI'm glad I found this blog! Occasionally, students want to know the keys to writing productive literary essays. Your first-class knowledge of this great job can become a suitable foundation for these people. Good
ReplyDeleteunindent does not match any outer indentation level python
It is imperative that we read blog post very carefully. I am already done it and find that this post is really amazing.
ReplyDeleteDigital Marketing Training Institutes in Hyderabad
Amazing Article,Really useful information to all So, I hope you will share more information to be check and share here.thanks for sharing .
ReplyDeleteWebsite: Vietnam package tours
This type of very helpful article. Very interesting to see this article.
ReplyDeleteData Science Training Institute in Bangalore
Additionally fantastic site here together with each the invaluable information which you might have. Maintain the fantastic job you're doing this here.
ReplyDeleteData Science Course In Bangalore With Placement
This is most informative and also this post most user friendly and super navigation to all posts... Thank you so much for giving this information to me..
ReplyDeleteDigital Marketing Course in Chennai
Digital Marketing Courses in Bangalore
Digital Marketing Course in Delhi
Digital Marketing Online Course
Glad to chat your blog, I seem to be forward to more reliable articles and I think we all wish to thank so many good articles, blog to share with us.
ReplyDeleteData Science Training
You might comment on the order system of the blog. You should chat it's splendid. Your blog audit would swell up your visitors. I was very pleased to find this site.I wanted to thank you for this great read!!
ReplyDeleteBest Institute for Data Science in Hyderabad
Actually I read it yesterday but I had some thoughts about it and today I wanted to read it again because it is very well written.
ReplyDeleteBest Digital Marketing Courses in Hyderabad
Data is nothing but a random heap of unorganized junk. So, the first and foremost of the steps involves putting this data into a format that can be easily used in later stages. data science course syllabus
ReplyDeleteI finally found great post here.I will get back here. I just added your blog to my bookmark sites. thanks.Quality posts is the crucial to invite the visitors to visit the web page, that's what this web page is providing.
ReplyDeleteBest Institute for Data Science in Hyderabad
keep up the good work. this is an Ossam post. This is to helpful, i have read here all post. i am impressed. thank you. this is our site please visit to know more information
ReplyDeletedata science training
Thanks for your post. I’ve been thinking about writing a very comparable post over the last couple of weeks, I’ll probably keep it short and sweet and link to this instead if thats cool. Thanks.
ReplyDeleteBest Institute for Data Science in Hyderabad
Best IT Training in Chennai
ReplyDelete
ReplyDeleteStudents have many types of problems related to college assignments. So, we have a well-educated expert for writing assignments. If you have any problem with writing assignments. then Don’t worry because we provide the best online assignment help and free plagiarism assignment.
Online Assignment Help
I appreciate your blog post. Thanks for sharing a very interesting blog, Excellent blog!
ReplyDeleteskills required for software tester
skills for software tester
robotic process automation scope
use of php language
digital marketing executive interview questions and answers for freshers
As time went by the workload of grading and answering the exams got easier because I could draw upon my extensive history of previous emails. data science course in india
ReplyDeleteSuch a very useful article. Very interesting to read this article.I would like to thank you for the efforts you had made for writing this awesome article.
ReplyDelete360DigiTMG data science institute in ECIL
https://www.crusherandparts.com
ReplyDeleteCone Crusher Liners
Vibrating Screen Mesh Types
Impact Plate
Impact Crusher Blow Bars
Jaw crusher wear parts
We organize and publish all kinds of information about mining machinery and construction machinery. We provide all kinds of production solutions. We recommend all kinds of equipment we know well.
ReplyDeletehttps://www.crusherandparts.com
Much thanks for composing such an intriguing article on this point. This has truly made me think and I plan to peruse more ExcelR Business Analytics Courses
ReplyDeleteThanks for sharing wonderful information. keep posting this content, this blog is very useful.
ReplyDeleteJava Training in Chennai
Java Course in Chennai
This is the best post and Keep doing it. Thank you for your valuable efforts...!
ReplyDeleteContent Writing Online Course
Content Writing Training in Chennai
Google Analytics Training in Chennai
Google Analytics Online Training
Thanks
ReplyDeleteDevOps Training in Chennai
https://webdesignpatnadigitalmarketing.blogspot.com/2017/10/seo-website-design-digital-marketing.html?showComment=1609923060190#c5218960497578541263
ReplyDeleteplay fantasy cricket Download app to know more.Play and win exclusive prizes & experiences, only with Fantasy Power 11 .Fantasy Power 11- fantasy cricket best app.
ReplyDeleteBall valve
ReplyDeleteGlobe valve
Check valve
Valve grease injection fittings
Condensate pot
Fantastic site. A lot of useful information here. I send it to friends and also share it delicious. And of course, thanks to your effort! data science training in Mumbai
ReplyDeleteThanks for the information about Blogspot very informative for everyone
ReplyDeletedata scientist certification
Nice blog, want to know about Robo4J and the Java Flight Recorder.First Copy Ladies Watches Online
ReplyDeleteVery genuine post i love to share like this kind of article, eventually thanks for sharing.how to play fantasy cricket
ReplyDeleteVery genuine post i love to share like this kind of article, eventually thanks forsharing.fantasy cricket app
ReplyDeleteYour work ethic is out of this world! The pride you take in your work is truly inspiring.
ReplyDeletehttps://360digitmg.com/course/machine-learning-using-python-r
I am really enjoying reading your well written articles. I think you spend numerous effort and time updating your blog.
ReplyDeleteonline electronics shopping sites in india
Hello there to everyone, here everybody is sharing such information, so it's fussy to see this webpage, and I used to visit this blog day by day
ReplyDeletebest data science course
I was looking at a portion of your posts on this site and I consider this site is really enlightening! Keep setting up..
ReplyDeletedata science course noida
Incredibly conventional blog and articles. I am realy very happy to visit your blog. Directly I am found which I truly need. Thankful to you and keeping it together for your new post.
ReplyDeletedata science courses in noida
"Thank you very much for your information.
ReplyDeleteFrom,
"data science course in malaysia
I recently visited your blog and this is very useful for me. Thank you for your excellent post...
ReplyDeleteSharePoint Training in Chennai
SharePoint Course in Chennai
PLC Training in Chennai
HR Course in Chennai
Really Nice Information It's Very Helpful All courses Checkout Here.
ReplyDeletebest data science course
"Very Nice Blog!!!
ReplyDeletePlease have a look about "data science course in delhi ncr
Good information you shared. keep posting.
ReplyDeletedata science training in gurgaon
Aivivu chuyên vé máy bay, tham khảo
ReplyDeletevé máy bay đi Mỹ hạng thương gia
ve may bay tu han quoc ve viet nam
vé máy bay đi đà lạt bao nhiêu tiền
từ tphcm đi nha trang bao nhiêu tiếng
vé máy bay hà nội sài gòn tháng 9
very nice article. I also recommend a professional cnc builder EagleTec CNC.
ReplyDeletehttps://www.eagletec-cnc.com
I recently came across your blog and have been reading along. I thought I would leave my first comment. I don’t know what to say except that I have enjoyed reading.
ReplyDeleteWebsite: affordable roofing company
Thank you for sharing. Excellent post...! It is a very great idea and unique content. Thank you so much.
ReplyDeletereplica omega mens watches
I am very glad to here it is very good post. Thanks for sharing
ReplyDeleteWebsite: Online punjab state lottery
First You got a great blog .I will be interested in more similar topics. I see you have really very useful topics, i will be always checking your blog thanks.
ReplyDeletedigital marketing courses in hyderabad with placement
ReplyDeleteAwesome Blog!!! Thanks for it, it is more useful for us.
IELTS Coaching in Tambaram
IELTS Coaching in anna nagar
IELTS Coaching in Velachery
IELTS Coaching in OMR
IELTS Coaching in Chennai
Hello there! I simply want to offer you a huge thumbs up for the excellent information you have got here on this post. I will be coming back to your blog for more soon. Look into my homepage cosmetic gift boxes | cosmetic gift boxes
ReplyDeleteI read this article fully on the topic of the difference of most up-to-date and earlier technologies, it’s awesome article.
ReplyDeleteWebsite: renew passport singapore
I am reading your post from the beginning, it was so interesting to read & I feel thanks to you for posting such a good blog, keep updates regularly.I want to share about
ReplyDeletedata science course in pune
Such a very useful article. Very interesting to read this article.I would like to thank you for the efforts you had made for writing this awesome article.
ReplyDeletebest data science institute in hyderabad
"Very Nice Blog!!!
ReplyDeletePlease have a look about "
data science certification
Cool stuff you have and you keep overhaul every one of us
ReplyDeletedata science course in pune
A great website with interesting and unique material what else would you need.
ReplyDeletedigital marketing courses in hyderabad with placement
very informative and useful article.thanks for sharing.Angular training in Chennai
ReplyDeleteYou have done a amazing job with you website
ReplyDeletebusiness analytics course
Keep up the good work , I read few posts on this web site and I conceive that your blog is very interesting
ReplyDeleteTra ve may bay gia re tu Ha Lan ve Viet Nam
Vé máy bay giá rẻ tu New Zealand ve Viet Nam
combo cách ly trọn gói 14 ngày HCM
taxi sân bay nội bài 7 chỗ
Visa Hàn Quốc
xin visa kết hôn Nhật Bản
Informative article. Thanks for sharing with us.keep it up.
ReplyDeletemachine learning courses in aurangabad
The will to change is not yet matched with the enthusiasm - or the know-how. Ploughing the furrow is always for some other. And in the rush to commodity sell that next CV, why upset the HR? Well it's not upsetting the HR. It's not even upsetting the Sales Director. Salesforce training in India
ReplyDeleteThanks for sharing on java as it is my favorite topic.
ReplyDeleteData Science Training in Pune
thanks for sharing this post with us
ReplyDeletefull stack developer course
full stack developer course in Bangalore
Really impressed! Everything is very open and very clear clarification of issues. It contains truly facts. Your website is very valuable. Thanks for sharing.
ReplyDeletedata scientist training in malaysia
I see some amazingly important and kept up to length of your strength searching for in your on the site
ReplyDeletedata science course in malaysia
essentials terracotta premium chiffon hijab
ReplyDeletebest sellersgunmetal ribbed jersey hijab
Fascinating blog! Is your theme custom made or did you download it from somewhere?A theme like yours with a few simple tweeks would really make my blog jump out. Please let me know where you got your design. With thanks
ReplyDeletedat ve may bay gia re tu ha lan ve Viet Nam
vé máy bay từ toronto về việt nam
san ve may bay gia re tu new zealand ve Viet Nam
chuyến bay nhân đạo từ canada về việt nam
khi nào có chuyến bay từ nga về việt nam
Thanks for sharing your wealthy information. This is one of the excellent posts which I have seen. I go through your all of your blog, but this blog is the best one. It is really what I wanted to see hope in future you will continue for sharing such an excellent post
ReplyDeletevé máy bay từ mỹ về việt nam
Chuyến bay từ Đài Loan về Việt Nam hôm nay
bao giờ có chuyến bay từ đức về việt nam
vé máy bay từ san francisco về việt nam
thông tin chuyến bay từ canada về việt nam
giá thuê máy bay từ anh về việt nam
Very nice post. Thank you for sharing with us.
ReplyDeleteTamil novels pdf
Ramanichandran novels PDF
srikala novels PDF
Mallika manivannan novels PDF
muthulakshmi raghavan novels PDF
Infaa Alocious Novels PDF
N Seethalakshmi Novels PDF
Sashi Murali Tamil Novels
Thank you for sharing wonderful content
ReplyDeletedata scientist training in aurangabad
great article!! sharing these type of articles is the nice one and i hope you will share an article on data science.By giving a institute like 360DigiTMG.it is one the best institute for doing certified courses
ReplyDeletedata science course in aurangabad
nice blog!! i hope you will share a blog on Data Science.
ReplyDeletedata science training in aurangabad
luxury party wearsahara foil print hijab
ReplyDeleteluxury party weargoddess foil print hijab
We only employ highly qualified and competent bodyguards who are capable of dealing with close protection in UK
ReplyDeleteany challenges that may arise when they are on duty. We specialize in offering various effective and high-quality bodyguard services that ensure our valued clients are adequately protected.
informative blog
ReplyDeletedata scientist course in chennai
People like entrepreneurs, corporate, politicians, celebrities and public speakers may bodyguard company
ReplyDeletebe always on the radar of people who would like to harm or kidnap you for personal or financial gains. Be it your workplace or home, it is important to feel safe.
Thank for sharing an informative tutorial.
ReplyDeleteBest Azure Training in Chennai
php course in chenna
Software training institute in chennai
rpa uipath training in chennai
cloud computing courses in chennai
best devops training in chennai
blue prism course in chennai
best rpa training in chennai
This is very useful software for you and me. No errors were found during the check.
ReplyDeleteYou can use it. I hope you like it.
Environmental Graphic Design
This is a great article thanks for sharing this informative information. I will visit your blog regularly for some latest posts. I will visit your blog regularly for Some latest posts.
ReplyDeleteaws online training in hyderabad
Thank you very much for sharing such a great article. Great post I must say and thanks for the information. Education is definitely a sticky subject. very informative. Take care.Digital marketing training Mumbai
ReplyDeleteEducation is definitely a sticky subject. very informative. Take care.Digital marketing training Mumbai
ReplyDeletedigital marketing course Mumbai
This is a great inspiring blog.You have shared really very helpful information thank you.
ReplyDeleteBusiness Analytics Course in Bangalore
ReplyDeleteThis is an informative and knowledgeable article. therefore, I would like to thank you for your effort in writing this article.
Data Science Course in Bangalore
Really nice article
ReplyDeleteDigital Marketing Institute in Mumbai
This is the first time I visit here. I found such a large number of engaging stuff in your blog, particularly its conversation. From the huge amounts of remarks on your articles, I surmise I am by all accounts not the only one having all the recreation here! Keep doing awesome. I have been important to compose something like this on my site and you have given me a thought.
ReplyDelete360DigiTMG, the top-rated organisation among the most prestigious industries around the world, is an educational destination for those looking to pursue their dreams around the globe. The company is changing careers of many people through constant improvement, 360DigiTMG provides an outstanding learning experience and distinguishes itself from the pack. 360DigiTMG is a prominent global presence by offering world-class training. Its main office is in India and subsidiaries across Malaysia, USA, East Asia, Australia, Uk, Netherlands, and the Middle East.
ReplyDelete
ReplyDeleteVery Informative and useful... Keep it up the great work. I really appreciate your post.
It shows like you spend more effort and time to write this blog
https://bangaloredigitalmarketing.com/
https://bangaloredigitalmarketing.com/digital-marketing-courses-in-bangalore/
https://bangaloredigitalmarketing.com/seo-company-in-bangalore/
https://bangaloredigitalmarketing.com/social-media-marketing-agency-in-bangalore/
Thank You for Providing Such insightful information. If someone is looking for the dil jalane wali shayari | shayari for true love | radha krishna shayari.
ReplyDeletethanks for share
ReplyDeletedata scientist courses aurangabad
Thanks for the information about Blogspot very informative for everyone
ReplyDeletedata analytics course aurangabad
Very impressive!!! When I searched for this, I found this website at the top of all the blogs in the search engines.
ReplyDeleteData Science Course in Gorakhpur
Thank You for Providing Such insightful information. If someone is looking for the Quickbooks Customer Service in US.
ReplyDeleteNice Blog! such informative things you are sharing,I really liked your content. Get the best Data Science online course in the comfort of your home. Flexible timings, Best industry trainers, and meticulously crafted curriculum.data analyst course in chennai
ReplyDeleteThe new wave of innovation that is changing the way people do business is called data science. Gain expertise in organizing, sorting, and transforming data to uncover hidden patterns Learn the essential skills of probability, statistics, and machine learning along with the techniques to break your data into a simpler format to derive meaningful information. Enroll in Data science in Bangalore and give yourself a chance to power your career to greater heights.
ReplyDeleteData Analytics Course in Calicut
With multitude of career opportunities opening up in Data Science domain and more and more IT professionals are looking for best Data Science courses to start their Data Sciences career. 360DigiTMG is the best place to start your technical training. As we are equipped with world-class curriculum to suit all your technical needs.
ReplyDeleteData Science in Bangalore with Placement
You completed certain reliable points there.
ReplyDeleteI did a search on the subject and found nearly all persons will agree with your blog.
360DigiTMG data scientist course
Enroll in the Best Data Science program in Chennai and become a successful Data Scientist.
ReplyDeleteData Science Training in Delhi
Register for the Data Science certification in Bangalore and gain recognition and credibility in your organization. Learn the techniques to examine large data sets and discover patterns that are valuable to predict market trends. Learn Data Exploration and Visualizations, Neural Networks and Deep Learning, Model Evaluation and Analysis. This course will ensure that you are challenged to go from a beginner with no Data Science experience to someone who can juggle data with ease.
ReplyDeleteData Science Course in Delhi
Get a comprehensive overview of Data Science and learn all the essential skills including collecting, modeling, and interpreting data. Register with Data Science institute Bangalore and build a strong foundation for a career where you will be involved in uncovering valuable information for your organization. Learn Python, Machine Learning, Big Data, Deep Learning, and Analytics to take center stage in Data Science.
ReplyDeleteData Scientist Course in Delhi
Data analysis and data mining are used for this purpose. You might be new in this field, so you have no idea about these terms.
ReplyDeleteVisit Quickbooks Customer Service in US and find out QuickBooks is a software that helps you manage your business and track your income and expenses. It also helps you plan for future transactions, which in turn saves you time, money, and effort.
ReplyDeleteGreat post on Robo4J and the Java Flight Recorder, thanks for providing valuable information , keep posting more Java Training In Pune
ReplyDeleteIam very pleased to read your article
ReplyDeletepython online training in hyderabad
Thanks for sharing this. this article is really helpful and informative. rpa certification
ReplyDeleteThanks for sharing this amazing article. rpa developer course
ReplyDeleteThanks for sharing this amazing article. azure 204 course
ReplyDeleteThis is a vey intresting blog
ReplyDeleteShreyan IT, helps companies/employers get matched with talented candidates who meet their requirements. We provide staffing solutions for local, national, and global recruitment needs. Our goal is to assist job seekers in finding new positions while also assisting employers in finding the best applicant for their available positions.
ReplyDeleteVery informative blog. I appreciate you sharing this post with us. Java stands as one of the most popular and powerful programming languages, and mastering it can open doors to endless opportunities in the rapidly evolving tech industry. Learning Java course in Solapur can undoubtedly open doors to numerous opportunities and pave the way for a successful career in the ever-expanding world of technology.
I really appreciate your efforts.Thanks for the wonderful post.
ReplyDeleteJava Training in Nagpur
The article provides a comprehensive guide to using JFR with Robo4J, showcasing the practical application of these tools in the realm of robotics, particularly in the context of laser range finders and scans calibration.
ReplyDeleteIf anyone wants to build their career in the field of Data Analytics then chcek this article about best Data Analytics Courses in Pune:
Data Analytics Courses in Pune